�@�@�@�@�@�E�@�P��DATA�M���ƂT��CLK�M���̃C���^�[�t�F�[�X��KeyBoard���APC�����ɓd�C��H�I�ɂ͑S��������4.�VK��
�@�@�@�@�@�@�@�v���A�b�v�ɂ��NPN�g�����W�X�^�I�[�v���R���N�^��H�ɂȂ��Ă��܂��B���͂Əo�͕͂ʃ|�[�g�̍\���ƂȂ���
�@�@�@�@�@�@�@���܂��B�@���������ā@PC���̏��v�|�[�g���́@���v�S�|�[�g�ƂȂ�܂��B�@�i���}�@���@�Q�Ɓj
�@�@�@�@�@�@�@�@���ۂɐ��삵�����̂́A���Ȃ��|�[�g����PS�Q�C���^�[�t�F�[�X����������ϓ_����PIC�̗���o���d�����e�l
�@�@�@�@�@�@�@��25mA�Ƒ傫�����Ƃ𗘗p���ĐM�����C���ɒ����R��150���̒�R��}�����邱�ƂƂ��܂����B�i���}�@�E�Q�Ɓj
�@�@�@�@�@�@�@�@�@���@KeyBoard���̃g�����W�X�^��ON�iON�d����0.4V�j�APIC���̃|�[�g���o�̓��[�h�hHigh�h�̏ꍇ������
�@�@�@�@�@�@�@�@�@�@�@�����PIC���̃|�[�g�̓d����3.6V�ł����B���������āA���̎���PIC�̏o�͓d���́@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@I���i3.6V-0.4V�j/150���@���@21.3mA�@�@�i�@���@25mA�@�@�@�@���@OK�@�j�@�@
�@�@�@�@�@�@�@�@�@�@�@�܂��APIC�̓��̓��x���hHigh�h��TTL���x����2.0V�ȏ�ƂƋK�肳��Ă��܂��B���̖ʂ�����`�F�b�N
�@�@�@�@�@�@�@�@�@�@�@���Ă݂܂���
�@�@�@�@�@�@�@�@�@�@�@�@�@�@3.6V�@���@2.0V�@�@�i�@���@OK�@�j
�@�@�@�@�@�@�@�@�@�@�ƂȂ�܂��B
�@�@�@�@�@�@�@�@�@���@����AKeyBoard���̃g�����W�X�^��OFF�Ł@PIC�����hLow�h�̏ꍇ��KeyBoard���̏o�͓d������������
�@�@�@�@�@�@�@�@�@�@�@�݂�� �߂̂��v�Z�l�@0.54V�@�i��150��/�i150���{4.7K���j�~�i5V - 0.4V�j�@�{�@0.4V�j��菬����0.4V��
�@�@�@�@�@�@�@�@�@�@�@�����B�@KeyBoard����Low���x���̃X���b�V���z�[���h���x����TTL���x����CMOS���x�����킩���
����
�@�@�@�@�@�@�@�@�@�@�@�@�@0.4V�@���@0.8V�@�iTTL���x���̏ꍇ�@�@���@OK�@�j
�@�@�@�@�@�@�@�@�@�@�@�@�@0.4V�@���@1.5V�@�iCMOS���x���ꍇ�@at�@Vcc��+�TV�@�@���@OK�@�j
�@�@�@�@�@�@�@�@�@�@�@�Ɩ��Ȃ����Ƃ��킩��܂��B
�@���v���O�����၄
//--------------------------------------
//--------------------------------------
// �\��
//�@KeyBoard ���@PIC18F452�@���@�@16�����L�����N�^�t��
//�@�@�@�@�@�@�@�@�@�@���@shift capsLock �Ή�
// PIC����L�[�{�[�h�ւ̑��M
//�@�@�@�@�@CLK����60��sec�ȏ�C���A�N�e�B�u�iL�j�ɂ���
//�@�@�@�A�@����DATA����60��sec���x�C���A�N�e�B�u�iL�j�ɂ��܂�
//�@�@�@�B DATA���ACLK�����A60��sec���x�N�e�B�u�iH)�ɂ���
//�@�@�@�C �X�^�[�g�r�b�g��DATA���ɏo�͂��@DATA���ɃL�[�{�[�h���N���b�N���o�͂���̂�҂�
//�@�@�@�D CLK���ɃN���b�N�̗���������o������DATA�����ް����o�͂���
//�@�@�@�E�@�r�b�g�W�ɂ͊�p���e�B���v�Z���Đݒ肷��
#include "18f452.h"
#use delay(clock=40000000)
#FUSES EC,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#use RS232(BAUD=9600,XMIT=PIN_C6,RCV=PIN_C7) // TX=RC6,RX=RC7
#byte INTCON3=0xFF1 //�A�h���X0xFF1�̕ϐ���INTCON3�Ɩ���
#byte TRISB=0xF93
#define Transmit 1
#define Receive 0
//////// Port define and link LCD library
#define mode 0
// No1 �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
#include "ScanTable1.h"
unsigned long int BitReceiveData = 0,BitSendData = 0;
int BitReceiveCount = 0,ix,TRMode = Receive,BitSendCount =0;
char ScanData[100],AsciiData[100];
short int Flag,Shift = 0,Caps = 0,CapsNow = 0,CapsTrigger =0,LockTrigger = 0;
unsigned long int temp;
void Lcd() //�t���\��
{
lcd_cmd(0x01); //�@�S����
printf(lcd_data,"%c %x %x %x %x",
AsciiData[ix-1],ScanData[ix-1],ScanData[ix-2],ScanData[ix-3],ScanData[ix-4]); // ���Ȃ�@�����\��
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data," %x %x %x %x %x",
ScanData[ix-5],ScanData[ix-6],ScanData[ix-7],ScanData[ix-8],ScanData[ix-9]);
}
unsigned long int Parityx(unsigned long int Datax) // �p���e�B�v�Z
{
unsigned long int i = 0,Parity = 0;
for(i = 0; i < 8; i ++ )
{
if(bit_test(Datax,i) == 1)Parity = Parity + 1;
}
if((Parity % 2) == 1) Parity = 0;
else Parity = 1;
return Parity;
}
void BitSendDataSet() //��p���e�B�f�[�^�̾�� �y�с@���M�f�[�^�̾��
{
unsigned long int Parity;
Parity = Parityx(BitSendData);
if(Parity == 1)bit_set(BitSendData,8);
else bit_clear(BitSendData,8);
BitSendData =BitSendData << 1;
}
void TransmitModeSet(){ //�L�[�{�[�h���ɑ��M�������|�A������
set_tris_b(0x00); //B0�iDATA���j�A�@B1�iCLK���j���Ƃ��ɏo���߰Ăɐݒ�
output_low(PIN_B1); // CLK����L
output_high(PIN_B0);
delay_us(60);
output_low(PIN_B0); // DATA����L
delay_us(60); //60��sec���ƂɃL�[�{�[�h�̓��C�����`�F�b�N����̂�15msec�҂�
//�L�[�{�[�hi8042�̓z�X�g���ް��𑗐M���悤�Ƃ��Ă��邱�Ƃ�F�������͂�
set_tris_b(0b00000010); //B0�iDATA���j���o���߰ĂɁ@B1�iCLK���j������߰Ăɐݒ�
//�L�[�{�[�h���炒�̃N���b�N�ɓ�������B0����̏o�͂̏����������Ȃ�
output_low(PIN_B0); // DATA����L
TRMode = Transmit;
}
void Transmitx() //���M��
{
output_bit(PIN_B0,(bit_test(BitSendData,0)));
BitSendData = BitSendData >> 1;
BitSendCount++;
if(BitSendCount >= 12){
TRMode = Receive; //
BitSendCount = 0;
}
}
void Receivex(){ //��M��
temp = (unsigned long int) input(PIN_B0); // Clock H --> L
if((Flag == 0) && (temp == 0))Flag = 1;
if(Flag == 1)
{
BitReceiveData = (BitReceiveData >> 1) ;//���̃r�b�g�V�t�g�͂X��ł���B�P�O��ł͂Ȃ�
temp = (temp << 10);
BitReceiveData = BitReceiveData + temp ;
BitReceiveCount++;
if(BitReceiveCount >= 10)
{
BitReceiveData = BitReceiveData >> 2; // ���Q���̖����ް����폜
ScanData[ix] = (byte)(BitReceiveData & 0xFF);
//-------------------�V�t�g�L�[��������Ă��邩�ǂ����̔���
if( (ScanData[ix] == 0x12)||(ScanData[ix] == 0x59))Shift = 1;// �V�t�g�L�[Make����̏ꍇ
if( ((ScanData[ix] == 0x12)||(ScanData[ix] == 0x59))
&& (ScanData[ix-1] == 0xF0))Shift = 0;// �V�t�g�L�[Break����̏ꍇ
//-----Capsۯ�����
//-------Caps Lock �L�[��������Ă��邩�ǂ����̔���
if(ScanData[ix] == 0x58)
{
CapsNow = 1;
}
if( (ScanData[ix] == 0x58) && (ScanData[ix-1] == 0xF0))// CapsLock : Brake
{
CapsNow = 0;
}
if( ( (ScanData[ix] == 0x58) &&
!((ScanData[ix-1] == 0xf0) || (ScanData[ix-1] == 0x58) ) ) ||
((ScanData[ix] == 0x58) && (ScanData[ix-1] == 0x58) && (ScanData[ix-2] == 0xf0)) )
{
CapsTrigger = 1;
}
else CapsTrigger = 0;
//---------------Caps Lock ��Ԃ��ǂ����̔���
if( (CapsTrigger == 1) && (Shift == 1))
{
LockTrigger = 1;
}
else LockTrigger = 0;
AsciiData[ix] = ScanToAscii(ScanData[ix],(Shift | Caps));
// L R Shift or Caps
if((ScanData[ix] == 0x12) || (ScanData[ix] == 0x59) || (ScanData[ix] == 0x58))
{
AsciiData[ix] = AsciiData[ix -2];
}
if( (ScanData[ix] <= 0x80) )
{
lcd_cmd(0x01); //�@�S����
printf(lcd_data,"%c %x %x %x %x",
AsciiData[ix],ScanData[ix],ScanData[ix-1],ScanData[ix-2],ScanData[ix-3]); // ���Ȃ�@�����\��
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data," %x %x %x %x %x",
ScanData[ix-4],ScanData[ix-5],ScanData[ix-6],ScanData[ix-7],ScanData[ix-8]);
}
ix++; if(ix >=100)ix =0;
BitReceiveCount = 0;
BitReceiveData = 0x0000;
Flag = 0;
}
}
}
#INT_EXT1 //B1:Clk
void KeyBoardClk()
{
switch(TRMode){
case Receive:// �X�^���o�C��� �L�[�{�[�h����̐M���҂�
Receivex();
break;
case Transmit:// �L�[�{�[�h�ւ̑��M���[�h
Transmitx();
break;
default: break;
}
}
void CapsLockLed() //CapsLockLed��ON/OFF����
{
if(LockTrigger == 1)
{
disable_interrupts(INT_EXT1);
disable_interrupts(GLOBAL);
BitSendData = 0xFFED;
BitSendDataSet();
TransmitModeSet();
enable_interrupts(INT_EXT1); // Set up EXT1
enable_interrupts(GLOBAL);
do
{
}while(ScanData[ix-1] != 0xfa);
ScanData[ix-1] = 0xf8;
disable_interrupts(INT_EXT1);
disable_interrupts(GLOBAL);
if(Caps == 0)
{
BitSendData = 0xFF04; //CapsLockLED�@ON
Caps = 1; //
}
else
{
BitSendData = 0xFF00; //CapsLockLED�@OFF
Caps = 0;
}
BitSendDataSet();
TransmitModeSet();
enable_interrupts(INT_EXT1); // Set up EXT1
enable_interrupts(GLOBAL);
do
{
}while(ScanData[ix-1] != 0xfa);
if(ScanData[ix-2] == 0xf8)ScanData[ix-2] = 0xfa;
LockTrigger = 0;
}
}
void InitialCheck() //�d����������PIC�ƃL�[�{�[�h�Ԃ̑���M
{
//------- ���Z�b�g���߁@FF
BitSendData = 0xFFFF; //�L�[�{�[�h���Z�b�g����
BitSendDataSet(); //�p���e�B�v�Z���s�����M�f�[�^�����
TransmitModeSet(); //�L�[�{�[�h���ɑ��M�������|�A�����@���M���[�h��INT_EXT1�ɃN���b�N������̂�҂�
enable_interrupts(INT_EXT1); // INT_EXT�P���O�������݂����o�ł���悤�Ɋ����݂�������
enable_interrupts(GLOBAL);
do{ //�ŏ���Ack(0xFA : �R�}���h�ɑ��鐳�������ꂽ�����j���L�[�{�[�ނ��炩�����Ă���
}while(ScanData[ix-1] != 0xAA);//���̌�BAT�i0xAA:Basic Assurance Test)���������I���������L�[�{�[�h���炩�����Ă���
disable_interrupts(INT_EXT1);
disable_interrupts(GLOBAL);
BitSendData = 0xFFF2; //���ʏ��i�L�[�{�[�hor�}�E�X�H�@�ǂ̂悤�ȃL�[�{�[�h���H�j�@��v��
BitSendDataSet();//�p���e�B�v�Z���s�����M�f�[�^�����
TransmitModeSet();//�L�[�{�[�h���ɑ��M�������|�A�����@���M���[�h��INT_EXT1�ɃN���b�N������̂�҂�
enable_interrupts(INT_EXT1); // INT_EXT�P���O�������݂����o�ł���悤�Ɋ����݂�������
enable_interrupts(GLOBAL);
do{ //�ŏ���Ack(0xFA : �R�}���h�ɑ��鐳�������ꂽ�����j���L�[�{�[�ނ��炩�����Ă���
}while(ScanData[ix-1] != 0x83);//���{��L�[�{�[�h�̏ꍇ0xAB,0x83���������Ă���
disable_interrupts(INT_EXT1);
disable_interrupts(GLOBAL);
BitSendData = 0xFFED; //�L�[�{�[�h��LED�_���A�����v��
BitSendDataSet();
TransmitModeSet();
enable_interrupts(INT_EXT1); // Set up EXT1
enable_interrupts(GLOBAL);
do{
}while(ScanData[ix-1] != 0xfa);
ScanData[ix-1] = 0xf8;
disable_interrupts(INT_EXT1);
disable_interrupts(GLOBAL);
BitSendData = 0xFF00;
BitSendDataSet();
TransmitModeSet();
enable_interrupts(INT_EXT1);
enable_interrupts(GLOBAL);
do{
}while(ScanData[ix-1] != 0xfa);
if(ScanData[ix-2] == 0xf8)ScanData[ix-2] = 0xfa;
Lcd(); //�t���\��
}
main(){
TRISB = 0xFF;//B port all input mode
INTCON3 = 0b01000000;// �����݃��x�� : ���ʁ@(bit7)(bit6)(bit5)(bit4)(bit3)(bit2)(bit1)(bit0)
// = (X2�������x��)(X1�������x��)(�Ӗ���)(X2��������)(X1��������)(�Ӗ���)(X2�����t���O�j(X1�����t���O�j
ext_int_edge( 1, H_TO_L); // PIN_B1 ����̊O��������
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"start!!");
delay_ms(1000); // KeyBoard POR time�� MAX500msec
InitialCheck(); //�d����������PIC�ƃL�[�{�[�h�Ԃ̑���M
while(1)
{
CapsLockLed(); //CapsLockLed��ON/OFF����
}
return 0;
}
//-------------------------------------------------------------------------------------------------
//*******************************************
//�C���N���[�h�t�@�C�� ScanTable1.h
//*******************************************
char ShiftAscii(char ScanData)
{
char temp;
switch(ScanData)
{
case 0x16: temp = '!'; break;
case 0x1E: temp = '"'; break;
case 0x26: temp = '#'; break;
case 0x25: temp = '$'; break;
case 0x2E: temp = '%'; break;
case 0x36: temp = '&'; break;
case 0x3D: temp = 0x27; break;
case 0x3E: temp = '('; break;
case 0x46: temp = ')'; break;
case 0x45: temp = 0x7E; break;
case 0x1C: temp = 'A'; break;
case 0x32: temp = 'B'; break;
case 0x21: temp = 'C'; break;
case 0x23: temp = 'D'; break;
case 0x24: temp = 'E'; break;
case 0x2B: temp = 'F'; break;
case 0x34: temp = 'G'; break;
case 0x33: temp = 'H'; break;
case 0x43: temp = 'I'; break;
case 0x3B: temp = 'J'; break;
case 0x42: temp = 'K'; break;
case 0x4B: temp = 'L'; break;
case 0x3A: temp = 'M'; break;
case 0x31: temp = 'N'; break;
case 0x44: temp = 'O'; break;
case 0x4D: temp = 'P'; break;
case 0x15: temp = 'Q'; break;
case 0x2D: temp = 'R'; break;
case 0x1B: temp = 'S'; break;
case 0x2C: temp = 'T'; break;
case 0x3C: temp = 'U'; break;
case 0x2A: temp = 'V'; break;
case 0x1D: temp = 'W'; break;
case 0x22: temp = 'X'; break;
case 0x35: temp = 'Y'; break;
case 0x1A: temp = 'Z'; break;
case 0x4E: temp = '='; break;
case 0x55: temp = '~'; break;
case 0x6A: temp = '|'; break;
case 0x54: temp = '`'; break;
case 0x5B: temp = '{'; break;
case 0x4C: temp = '+'; break;
case 0x52: temp = ':'; break;
case 0x5D: temp = '}'; break;
case 0x41: temp = '<'; break;
case 0x49: temp = '>'; break;
case 0x4A: temp = '?'; break;
case 0x51: temp = '_'; break;
case 0x29: temp = ' '; break;
case 0x71: temp = '.'; break;
case 0x7B: temp = '-'; break;
case 0x79: temp = '+'; break;
default: temp = ScanData; break;
}
return temp;
}
char NoShiftAscii(char ScanData)
{
char temp;
switch(ScanData)
{
case 0x16: temp = '1'; break;
case 0x1E: temp = '2'; break;
case 0x26: temp = '3'; break;
case 0x25: temp = '4'; break;
case 0x2E: temp = '5'; break;
case 0x36: temp = '6'; break;
case 0x3D: temp = '7'; break;
case 0x3E: temp = '8'; break;
case 0x46: temp = '9'; break;
case 0x45: temp = '0'; break;
case 0x1C: temp = 'a'; break;
case 0x32: temp = 'b'; break;
case 0x21: temp = 'c'; break;
case 0x23: temp = 'd'; break;
case 0x24: temp = 'e'; break;
case 0x2B: temp = 'f'; break;
case 0x34: temp = 'g'; break;
case 0x33: temp = 'h'; break;
case 0x43: temp = 'i'; break;
case 0x3B: temp = 'j'; break;
case 0x42: temp = 'k'; break;
case 0x4B: temp = 'l'; break;
case 0x3A: temp = 'm'; break;
case 0x31: temp = 'n'; break;
case 0x44: temp = 'o'; break;
case 0x4D: temp = 'p'; break;
case 0x15: temp = 'q'; break;
case 0x2D: temp = 'r'; break;
case 0x1B: temp = 's'; break;
case 0x2C: temp = 't'; break;
case 0x3C: temp = 'u'; break;
case 0x2A: temp = 'v'; break;
case 0x1D: temp = 'w'; break;
case 0x22: temp = 'x'; break;
case 0x35: temp = 'y'; break;
case 0x1A: temp = 'z'; break;
case 0x4E: temp = '-'; break;
case 0x55: temp = '^'; break;
case 0x6A: temp = 0x5C; break;// ��
case 0x54: temp = '@'; break;
case 0x5B: temp = '['; break;
case 0x4C: temp = ';'; break;
case 0x52: temp = ':'; break;
case 0x5D: temp = ']'; break;
case 0x41: temp = ','; break;
case 0x49: temp = '.'; break;
case 0x4A: temp = '/'; break;
case 0x51: temp = 0x5C; break;//��
case 0x29: temp = ' '; break;
case 0x71: temp = '.'; break;
case 0x7B: temp = '-'; break;
case 0x79: temp = '+'; break;
default: temp = ScanData; break;
}
return temp;
}
char ScanToAscii( char ScanData ,int Shift )
{
char AsciiTemp;
if(Shift == 1)
{
AsciiTemp = ShiftAscii(ScanData);
}
else AsciiTemp = NoShiftAscii(ScanData);
return AsciiTemp ;
}
//---------------------------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
//-----------------------------------------------------------------------------------------------
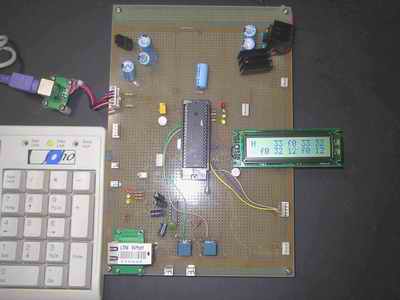
�@�����쌋�ʁ�
�@�@�E�ȉ��Ɂ@�L�[�{�[�h����hy�h�A�hb �h�@�Ɓ@�L�[�C�����ā@�hk�h�@�������Ďw�𗣂����ꍇ�̉t���\����
�@�@�@�����܂��B